在上文对Command Line Interfaces进行了简单的介绍之后,本文将对caffe的Solver相关的代码进行分析。
本文将主要分为四部分的内容:
- Solver的初始化(Register宏和构造函数)
- SIGINT和SIGHUP信号的处理
- Solver::Solve()具体实现
- SGDSolver::ApplyUpdate具体实现
Solver的初始化(Register宏和构造函数)
shared_ptr<caffe::Solver<float> >
solver(caffe::SolverRegistry<float>::CreateSolver(solver_param));caffe.cpp中的train函数中通过上面的代码定义了一个指向Solver
下面我们就来具体看一下SolverRegistry这个类的代码,以便理解是如何通过同一个函数得到不同类型的Solver:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
class SolverRegistry {
public:
typedef Solver<Dtype>* (*Creator)(const SolverParameter&);
typedef std::map<string, Creator> CreatorRegistry;
static CreatorRegistry& Registry() {
static CreatorRegistry* g_registry_ = new CreatorRegistry();
return *g_registry_;
}
static void AddCreator(const string& type, Creator creator) {
CreatorRegistry& registry = Registry();
CHECK_EQ(registry.count(type), 0)
<< "Solver type " << type << " already registered.";
registry[type] = creator;
}
static Solver<Dtype>* CreateSolver(const SolverParameter& param) {
const string& type = param.type();
CreatorRegistry& registry = Registry();
CHECK_EQ(registry.count(type), 1) << "Unknown solver type: " << type
<< " (known types: " << SolverTypeListString() << ")";
return registry[type](param);
}
static vector<string> SolverTypeList() {
CreatorRegistry& registry = Registry();
vector<string> solver_types;
for (typename CreatorRegistry::iterator iter = registry.begin();
iter != registry.end(); ++iter) {
solver_types.push_back(iter->first);
}
return solver_types;
}
private:
SolverRegistry() {}
static string SolverTypeListString() {
vector<string> solver_types = SolverTypeList();
string solver_types_str;
for (vector<string>::iterator iter = solver_types.begin();
iter != solver_types.end(); ++iter) {
if (iter != solver_types.begin()) {
solver_types_str += ", ";
}
solver_types_str += *iter;
}
return solver_types_str;
}
};
首先需要注意的是这个类的构造函数是private的,也就是用我们没有办法去构造一个这个类型的变量,这个类也没有数据成员,所有的成员函数也都是static的,可以直接调用。
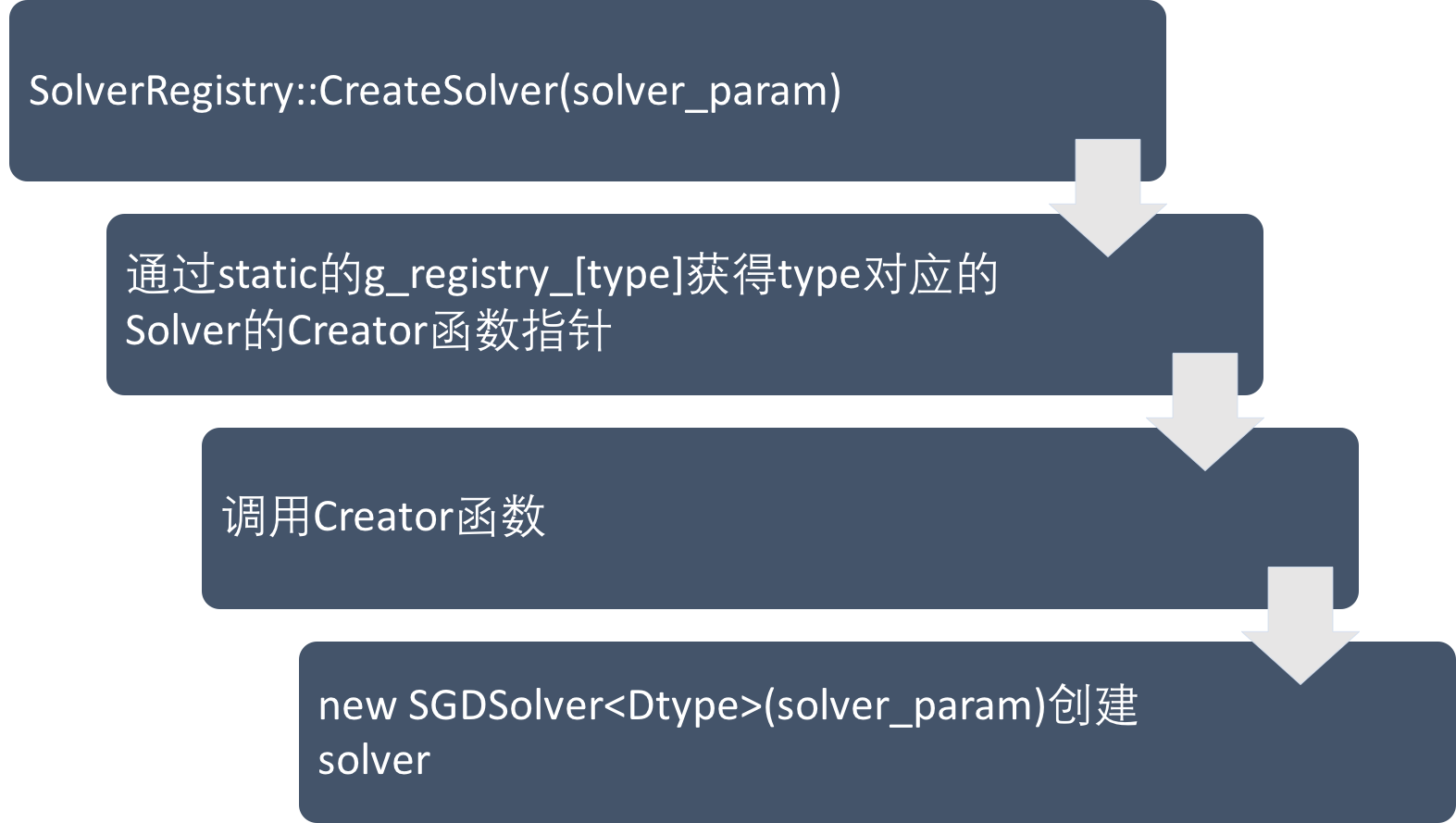
我们首先从 CreateSolver 函数(第15行)入手,这个函数先定义了string类型的变量type,表示Solver的类型(‘SGD’/’Nestrov’等),然后定义了一个key类型为string,value类型为Creator的map:registry,其中Creator是一个函数指针类型,指向的函数的参数为SolverParameter类型,返回类型为Solver
上面的代码中,Registry这个函数(第5行)中定义了一个static的变量g_registry,这个变量是一个指向CreatorRegistry这个map类型的指针,然后直接返回,因为这个变量是static的,所以即使多次调用这个函数,也只会定义一个g_registry,而且在其他地方修改这个map里的内容,是存储在这个map中的。事实上各个Solver的register的过程正是往g_registry指向的那个map里添加以Solver的type为key,对应的Creator函数指针为value的内容。Register的过程如流程图所示:
下面我们具体来看一下Solver的register的过程:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
template <typename Dtype>
class SolverRegisterer {
public:
SolverRegisterer(const string& type,
Solver<Dtype>* (*creator)(const SolverParameter&)) {
// LOG(INFO) << "Registering solver type: " << type;
SolverRegistry<Dtype>::AddCreator(type, creator);
}
};
#define REGISTER_SOLVER_CREATOR(type, creator) \
static SolverRegisterer<float> g_creator_f_##type(#type, creator<float>); \
static SolverRegisterer<double> g_creator_d_##type(#type, creator<double>) \
#define REGISTER_SOLVER_CLASS(type) \
template <typename Dtype> \
Solver<Dtype>* Creator_##type##Solver( \
const SolverParameter& param) \
{ \
return new type##Solver<Dtype>(param); \
} \
REGISTER_SOLVER_CREATOR(type, Creator_##type##Solver)
}
// register SGD Solver
REGISTER_SOLVER_CLASS(SGD);
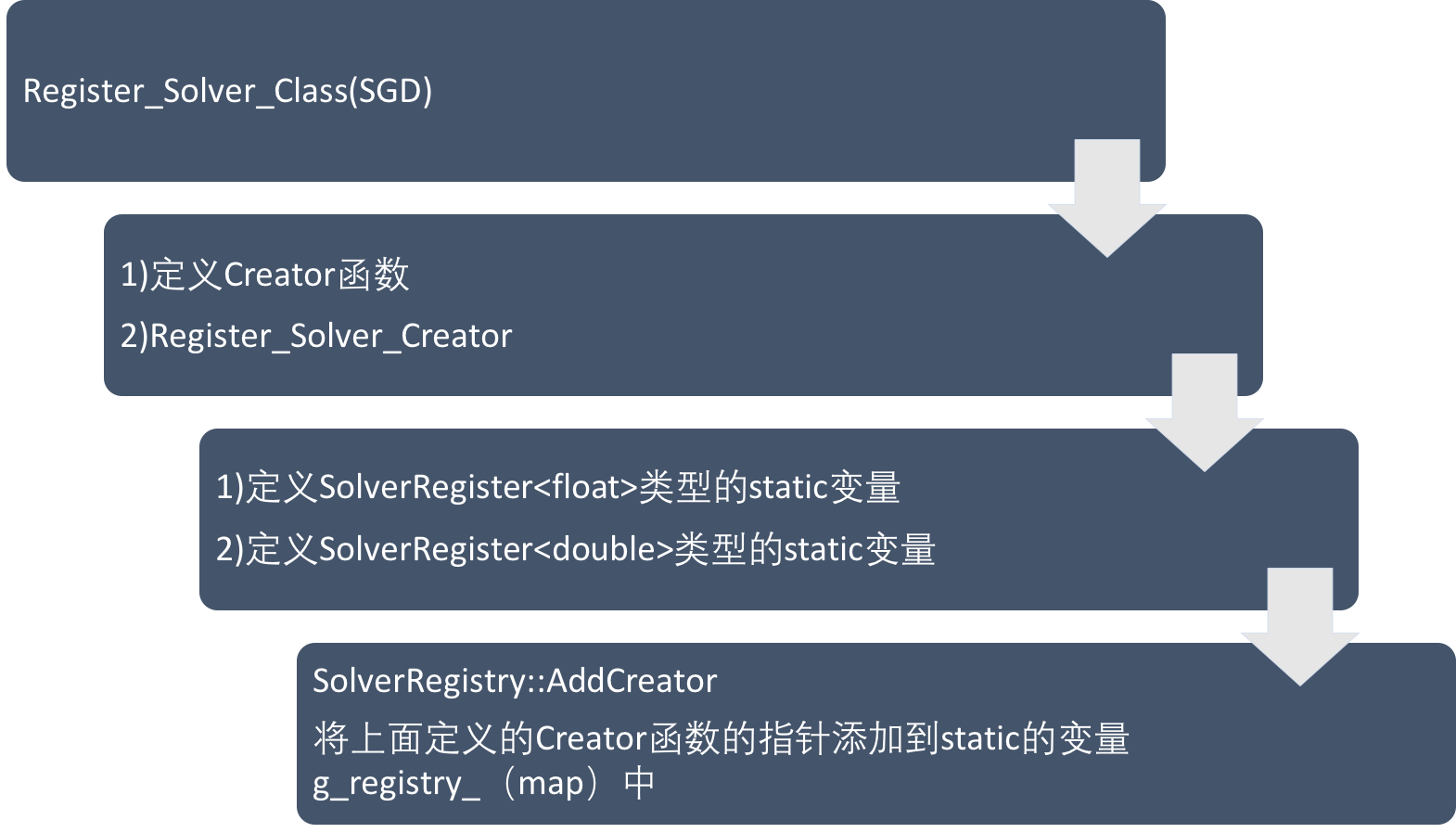
在sgd_solver.cpp(SGD Solver对应的cpp文件)末尾有上面第24行的代码,使用了REGISTER_SOLVER_CLASS这个宏,这个宏会定义一个名为Creator_SGDSolver的函数,这个函数即为Creator类型的指针指向的函数,在这个函数中调用了SGDSolver的构造函数,并将构造的这个变量得到的指针返回,这也就是Creator类型函数的作用:构造一个对应类型的Solver对象,将其指针返回。然后在这个宏里又调用了REGISTER_SOLVER_CREATOR这个宏,这里分别定义了SolverRegisterer这个模板类的float和double类型的static变量,这会去调用各自的构造函数,而在SolverRegisterer的构造函数中调用了之前提到的SolverRegistry类的AddCreator函数,这个函数就是将刚才定义的Creator_SGDSolver这个函数的指针存到g_registry指向的map里面。类似地,所有的Solver对应的cpp文件的末尾都调用了这个宏来完成注册,在所有的Solver都注册之后,我们就可以通过之前描述的方式,通过g_registry得到对应的Creator函数的指针,并通过调用这个Creator函数来构造对应的Solver。Register和Create对应的流程图如下所示:
SIGINT和SIGHUP信号的处理
Caffe在train或者test的过程中都有可能会遇到系统信号(用户按下ctrl+c或者关掉了控制的terminal),我们可以通过对sigint_effect和sighup_effect来设置遇到系统信号的时候希望进行的处理方式:
caffe train –solver=/path/to/solver.prototxt –sigint_effect=EFFECT –sighup_effect=EFFECT
在caffe.cpp中定义了一个GetRequesedAction函数来将设置的string类型的标志转变为枚举类型的变量:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
caffe::SolverAction::Enum GetRequestedAction(
const std::string& flag_value) {
if (flag_value == "stop") {
return caffe::SolverAction::STOP;
}
if (flag_value == "snapshot") {
return caffe::SolverAction::SNAPSHOT;
}
if (flag_value == "none") {
return caffe::SolverAction::NONE;
}
LOG(FATAL) << "Invalid signal effect \""<< flag_value << "\" was specified";
}
// SolverAction::Enum的定义
namespace SolverAction {
enum Enum {
NONE = 0, // Take no special action.
STOP = 1, // Stop training. snapshot_after_train controls whether a
// snapshot is created.
SNAPSHOT = 2 // Take a snapshot, and keep training.
};
}
其中SolverAction::Enum的定义在solver.hpp中,这是一个定义为枚举类型的数据类型,只有三个可能的值,分别对应了三种处理系统信号的方式:NONE(忽略信号什么都不做)/STOP(停止训练)/SNAPSHOT(保存当前的训练状态,继续训练)。在caffe.cpp中的train函数里Solver设置如何处理系统信号的代码为:
1
2
3
4
5
caffe::SignalHandler signal_handler(
GetRequestedAction(FLAGS_sigint_effect),
GetRequestedAction(FLAGS_sighup_effect));
solver->SetActionFunction(signal_handler.GetActionFunction());
FLAGS_sigint_effect和FLAGS_sighup_effect是通过gflags定义和解析的两个Command Line Interface的输入参数,分别对应遇到sigint和sighup信号的处理方式,如果用户不设定(大部分时候我自己就没设定),sigint的默认值为”stop”,sighup的默认值为”snapshot”。GetRequestedAction函数会将string类型的FLAGS_xx转为SolverAction::Enum类型,并用来定义一个SignalHandler类型的对象signal_handler。我们可以看到这部分代码都依赖于SignalHandler这个类的接口,我们先来看看这个类都做了些什么:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
// header file
class SignalHandler {
public:
// Contructor. Specify what action to take when a signal is received.
SignalHandler(SolverAction::Enum SIGINT_action,
SolverAction::Enum SIGHUP_action);
~SignalHandler();
ActionCallback GetActionFunction();
private:
SolverAction::Enum CheckForSignals() const;
SolverAction::Enum SIGINT_action_;
SolverAction::Enum SIGHUP_action_;
};
// source file
SignalHandler::SignalHandler(SolverAction::Enum SIGINT_action,
SolverAction::Enum SIGHUP_action):
SIGINT_action_(SIGINT_action),
SIGHUP_action_(SIGHUP_action) {
HookupHandler();
}
void HookupHandler() {
if (already_hooked_up) {
LOG(FATAL) << "Tried to hookup signal handlers more than once.";
}
already_hooked_up = true;
struct sigaction sa;
sa.sa_handler = &handle_signal;
// ...
}
static volatile sig_atomic_t got_sigint = false;
static volatile sig_atomic_t got_sighup = false;
void handle_signal(int signal) {
switch (signal) {
case SIGHUP:
got_sighup = true;
break;
case SIGINT:
got_sigint = true;
break;
}
}
ActionCallback SignalHandler::GetActionFunction() {
return boost::bind(&SignalHandler::CheckForSignals, this);
}
SolverAction::Enum SignalHandler::CheckForSignals() const {
if (GotSIGHUP()) {
return SIGHUP_action_;
}
if (GotSIGINT()) {
return SIGINT_action_;
}
return SolverAction::NONE;
}
bool GotSIGINT() {
bool result = got_sigint;
got_sigint = false;
return result;
}
bool GotSIGHUP() {
bool result = got_sighup;
got_sighup = false;
return result;
}
// ActionCallback的含义
typedef boost::function<SolverAction::Enum()> ActionCallback;
SignalHandler这个类有两个数据成员,都是SolverAction::Enum类型的,分别对应sigint和sighup信号,在构造函数中,用解析FLAGS_xx得到的结果分别给两个成员赋值,然后调用了HookupHandler函数,这个函数的主要作用是定义了一个sigaction类型(应该是系统级别的代码)的对象sa,然后通过sa.sa_handler = &handle_signal来设置,当有遇到系统信号时,调用handle_signal函数来处理,而我们可以看到这个函数的处理很简单,就是判断一下当前的信号是什么类型,如果是sigint就将全局的static变量got_sigint变为true,sighup的处理类似。
在根据用户设置(或者默认值)的参数定义了signal_handler之后,solver通过SetActionFunction来设置了如何处理系统信号。这个函数的输入为signal_handler的GetActionFunction的返回值,根据上面的代码我们可以看到,GetActionFunction会返回signal_handler这个对象的CheckForSignals函数的地址(boost::bind的具体使用请参考boost官方文档)。而在Solver的SetActionFunction函数中只是简单的把Solver的一个成员action_request_function_赋值为输入参数的值,以当前的例子来说就是,solver对象的action_request_function_指向了signal_handler对象的CheckForSignals函数的地址。其中的ActionCallback是一个函数指针类型,指向了参数为空,返回值为SolverAction::Enum类型的函数(boost::function具体用法参考官方文档)。
总结起来,我们通过定义一个SignalHandler类型的对象,告知系统在遇到系统信号的时候回调handle_signal函数来改变全局变量got_sigint和got_sighup的值,然后通过Solver的接口设置了其遇到系统函数将调用signal_handler的Check函数,这个函数实际上就是去判断当前是否遇到了系统信号,如果遇到某个类型的信号,就返回我们之前设置的处理方式(SolverAction::Enum类型)。剩余的具体处理再交给Solver的其它函数,后面会具体分析。
Solver::Solve()具体实现
Solve函数实现了具体的网络的优化过程,下面我们来具体分析一下这部分的代码,分析见注释:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
void Solver<Dtype>::Solve(const char* resume_file) {
// 检查当前是否是root_solver(多GPU模式下,只有root_solver才运行这一部分的代码)
CHECK(Caffe::root_solver());
// 然后输出learning policy(更新学习率的策略)
LOG(INFO) << "Solving " << net_->name();
LOG(INFO) << "Learning Rate Policy: " << param_.lr_policy();
// requested_early_exit_一开始被赋值为false,也就是现在没有要求在优化结束前退出
requested_early_exit_ = false;
// 判断resume_file这个指针是否NULL,如果不是则需要从resume_file存储的路径里读取之前训练的状态
if (resume_file) {
LOG(INFO) << "Restoring previous solver status from " << resume_file;
Restore(resume_file);
}
// 然后调用了'Step'函数,这个函数执行了实际的逐步的迭代过程
Step(param_.max_iter() - iter_);
// 迭代结束或者遇到系统信号提前结束后,判断是否需要在训练结束之后snapshot
// 这个可以在solver.prototxt里设置
if (param_.snapshot_after_train()
&& (!param_.snapshot() || iter_ % param_.snapshot() != 0)) {
Snapshot();
}
// 如果在Step函数的迭代过程中遇到了系统信号,且我们的处理方式设置为STOP,
// 那么requested_early_exit_会被修改为true,迭代提前结束,输出相关信息
if (requested_early_exit_) {
LOG(INFO) << "Optimization stopped early.";
return;
}
// 判断是否需要输出最后的loss
if (param_.display() && iter_ % param_.display() == 0) {
Dtype loss;
net_->ForwardPrefilled(&loss);
LOG(INFO) << "Iteration " << iter_ << ", loss = " << loss;
}
// 判断是否需要最后Test
if (param_.test_interval() && iter_ % param_.test_interval() == 0) {
TestAll();
}
LOG(INFO) << "Optimization Done.";
}
下面继续分析具体的迭代过程发生的Step函数:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
template <typename Dtype>
void Solver<Dtype>::Step(int iters) {
vector<Blob<Dtype>*> bottom_vec;
// 设置开始的迭代次数(如果是从之前的snapshot恢复的,那iter_等于snapshot时的迭代次数)和结束的迭代次数
const int start_iter = iter_;
const int stop_iter = iter_ + iters;
// 输出的loss为前average_loss次loss的平均值,在solver.prototxt里设置,默认为1,
// losses存储之前的average_loss个loss,smoothed_loss为最后要输出的均值
int average_loss = this->param_.average_loss();
vector<Dtype> losses;
Dtype smoothed_loss = 0;
// 迭代
while (iter_ < stop_iter) {
// 清空上一次所有参数的梯度
net_->ClearParamDiffs();
// 判断是否需要测试
if (param_.test_interval() && iter_ % param_.test_interval() == 0
&& (iter_ > 0 || param_.test_initialization())
&& Caffe::root_solver()) {
TestAll();
// 判断是否需要提前结束迭代
if (requested_early_exit_) {
break;
}
}
for (int i = 0; i < callbacks_.size(); ++i) {
callbacks_[i]->on_start();
}
// 判断当前迭代次数是否需要显示loss等信息
const bool display = param_.display() && iter_ % param_.display() == 0;
net_->set_debug_info(display && param_.debug_info());
Dtype loss = 0;
// iter_size也是在solver.prototxt里设置,实际上的batch_size=iter_size*网络定义里的batch_size,
// 因此每一次迭代的loss是iter_size次迭代的和,再除以iter_size,这个loss是通过调用Net::ForwardBackward函数得到的
// 这个设置我的理解是在GPU的显存不够的时候使用,比如我本来想把batch_size设置为128,但是会out_of_memory,
// 借助这个方法,可以设置batch_size=32,iter_size=4,那实际上每次迭代还是处理了128个数据
for (int i = 0; i < param_.iter_size(); ++i) {
loss += net_->ForwardBackward(bottom_vec);
}
loss /= param_.iter_size();
// 计算要输出的smoothed_loss,如果losses里还没有存够average_loss个loss则将当前的loss插入,如果已经存够了,则将之前的替换掉
if (losses.size() < average_loss) {
losses.push_back(loss);
int size = losses.size();
smoothed_loss = (smoothed_loss * (size - 1) + loss) / size;
} else {
int idx = (iter_ - start_iter) % average_loss;
smoothed_loss += (loss - losses[idx]) / average_loss;
losses[idx] = loss;
}
// 输出当前迭代的信息
if (display) {
LOG_IF(INFO, Caffe::root_solver()) << "Iteration " << iter_
<< ", loss = " << smoothed_loss;
const vector<Blob<Dtype>*>& result = net_->output_blobs();
int score_index = 0;
for (int j = 0; j < result.size(); ++j) {
const Dtype* result_vec = result[j]->cpu_data();
const string& output_name =
net_->blob_names()[net_->output_blob_indices()[j]];
const Dtype loss_weight =
net_->blob_loss_weights()[net_->output_blob_indices()[j]];
for (int k = 0; k < result[j]->count(); ++k) {
ostringstream loss_msg_stream;
if (loss_weight) {
loss_msg_stream << " (* " << loss_weight
<< " = " << loss_weight * result_vec[k] << " loss)";
}
LOG_IF(INFO, Caffe::root_solver()) << " Train net output #"
<< score_index++ << ": " << output_name << " = "
<< result_vec[k] << loss_msg_stream.str();
}
}
}
for (int i = 0; i < callbacks_.size(); ++i) {
callbacks_[i]->on_gradients_ready();
}
// 执行梯度的更新,这个函数在基类Solver中没有实现,会调用每个子类自己的实现,后面具体分析SGDSolver的实现
ApplyUpdate();
// 迭代次数加1
++iter_;
// 调用GetRequestedAction,实际是通过action_request_function_函数指针调用之前设置好(通过SetRequestedAction)的
// signal_handler的CheckForSignals函数,这个函数的作用是
// 会根据之前是否遇到系统信号以及信号的类型和我们设置(或者默认)的方式返回处理的方式
SolverAction::Enum request = GetRequestedAction();
// 判断当前迭代是否需要snapshot,如果request等于SNAPSHOT则也需要
if ((param_.snapshot()
&& iter_ % param_.snapshot() == 0
&& Caffe::root_solver()) ||
(request == SolverAction::SNAPSHOT)) {
Snapshot();
}
// 如果request为STOP则修改requested_early_exit_为true,之后就会提前结束迭代
if (SolverAction::STOP == request) {
requested_early_exit_ = true;
break;
}
}
}
SGDSolver::ApplyUpdate具体实现
每一组网络中的参数的更新都是在不同类型的Solver自己实现的ApplyUpdate函数中完成的,下面我们就以最常用的SGD为例子来分析这个函数具体的功能:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
template <typename Dtype>
void SGDSolver<Dtype>::ApplyUpdate() {
CHECK(Caffe::root_solver());
// GetLearningRate根据设置的lr_policy来计算当前迭代的learning rate的值
Dtype rate = GetLearningRate();
// 判断是否需要输出当前的learning rate
if (this->param_.display() && this->iter_ % this->param_.display() == 0) {
LOG(INFO) << "Iteration " << this->iter_ << ", lr = " << rate;
}
// 避免梯度爆炸,如果梯度的二范数超过了某个数值则进行scale操作,将梯度减小
ClipGradients();
// 对所有可更新的网络参数进行操作
for (int param_id = 0; param_id < this->net_->learnable_params().size();
++param_id) {
// 将第param_id个参数的梯度除以iter_size,这一步的作用是保证实际的batch_size=iter_size*设置的batch_size
Normalize(param_id);
// 将正则化部分的梯度降入到每个参数的梯度中
Regularize(param_id);
// 计算SGD算法的梯度(momentum等)
ComputeUpdateValue(param_id, rate);
}
// 调用Net::Update更新所有的参数
this->net_->Update();
}
下面我们继续具体分析一下Normalize/Regularize/ComputeUpdateValue的实现,我们均以CPU的代码为例子,GPU部分的处理原理是一样的:
Normalize
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
template <typename Dtype>
void SGDSolver<Dtype>::Normalize(int param_id) {
// 如果iter_size的值为1,则不需要任何处理直接return
if (this->param_.iter_size() == 1) { return; }
// 通过net_返回所有可以学习的参数,是一个vector<shared_ptr<Blob<Dtype> > >
const vector<Blob<Dtype>*>& net_params = this->net_->learnable_params();
// 要乘以的系数等于1/iter_size
const Dtype accum_normalization = Dtype(1.) / this->param_.iter_size();
switch (Caffe::mode()) {
case Caffe::CPU: {
// caffe_scal在/CAFFE_ROOT/src/caffe/util/math_functions.cpp中
// 是blas的scale函数的一个封装,第一个参数是数据的个数,第二个参数是乘以的系数,
// 第三个参数是数据的指针
caffe_scal(net_params[param_id]->count(), accum_normalization,
net_params[param_id]->mutable_cpu_diff());
break;
}
case Caffe::GPU: {
// GPU代码略
}
}
Regularize
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
template <typename Dtype>
void SGDSolver<Dtype>::Regularize(int param_id) {
// 获取所有可以学习的参数的vector
const vector<Blob<Dtype>*>& net_params = this->net_->learnable_params();
// 获取所有的参数对应的weight_decay的vector
const vector<float>& net_params_weight_decay =
this->net_->params_weight_decay();
// 模型整体的weight_decay数值
Dtype weight_decay = this->param_.weight_decay();
// 获取正则化的类型:L1 或 L2
string regularization_type = this->param_.regularization_type();
// 实际的weight_decay等于整体模型的数值乘以具体每个参数的数值
Dtype local_decay = weight_decay * net_params_weight_decay[param_id];
switch (Caffe::mode()) {
case Caffe::CPU: {
// 如果weight_decay不为0,则计算
if (local_decay) {
if (regularization_type == "L2") {
// L2的梯度为diff_ = weight_decay*data_ + diff_
// caffe_axpy的功能是 y = a*x + y
// 第一个参数是数据的个数,第二个是上式的a,第三个是x的指针,第四个是y的指针
caffe_axpy(net_params[param_id]->count(),
local_decay,
net_params[param_id]->cpu_data(),
net_params[param_id]->mutable_cpu_diff());
} else if (regularization_type == "L1") {
// L1的梯度为diff_ = diff_ + sign(data_)
// temp_ = sign(data_)
caffe_cpu_sign(net_params[param_id]->count(),
net_params[param_id]->cpu_data(),
temp_[param_id]->mutable_cpu_data());
// 将temp_加到diff_中 diff_ = weight_decay*temp_ + diff_
caffe_axpy(net_params[param_id]->count(),
local_decay,
temp_[param_id]->cpu_data(),
net_params[param_id]->mutable_cpu_diff());
} else {
LOG(FATAL) << "Unknown regularization type: " << regularization_type;
}
}
break;
}
// GPU代码略
}
ComputeUpdatedValue
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
template <typename Dtype>
void SGDSolver<Dtype>::ComputeUpdateValue(int param_id, Dtype rate) {
// 获取所有可以更新的参数的vector
const vector<Blob<Dtype>*>& net_params = this->net_->learnable_params();
// 获取所有参数对应的learning_rate的vector
const vector<float>& net_params_lr = this->net_->params_lr();
// 获取momentum数值
Dtype momentum = this->param_.momentum();
// 实际的learning_rate为全局的learning_rate乘以每个参数对应的learning_rate
Dtype local_rate = rate * net_params_lr[param_id];
switch (Caffe::mode()) {
case Caffe::CPU: {
// 关于SGD的公式参考caffe官网tutorial的Solver部分
// history_存储了上一次的梯度,下面这个函数:
// history_ = learning_rate*diff_ + momentum*history
caffe_cpu_axpby(net_params[param_id]->count(), local_rate,
net_params[param_id]->cpu_diff(), momentum,
history_[param_id]->mutable_cpu_data());
// 把当前的梯度拷贝给参数Blob的diff_
caffe_copy(net_params[param_id]->count(),
history_[param_id]->cpu_data(),
net_params[param_id]->mutable_cpu_diff());
break;
}
case Caffe::GPU: {
// GPU代码略
}
}
至此Solver主要的代码都已经分析完了,总结起来主要有:(1)solver_factory的register和create不同类型Solver的机制,(2)通过signal_handler来获取系统信号,并根据用户或默认的设置进行相应的处理,(3)Solver::Solve函数的具体实现的分析,(4)SGDSolver::ApplyUpdate函数的具体实现。前面三个部分都属于基类的,最后一个是SGDSolver这个子类的,如果用户想要实现自己的Solver类,也应该类似地去继承基类,并实现自己的ApplyUpdate函数,在代码的末尾通过register宏完成注册,便可以被成功的调用。